
More about …High Resolution Inventory Solutions (HRIS)
How Does HRIS Work?
EFI and ITI
Enhanced Forest Inventory (EFI) and Individual Tree Inventory (ITI) are forest inventory approaches for collecting and analyzing data. Each approach has its strengths and applications, depending on available data and your forest inventory objectives.
HRIS offers advanced AI-based, machine learning forest inventory solutions with EFI and ITI capabilities. HRIS provides the best of both worlds (combining the strengths of EFI and ITI) in a unique and powerful inventory. HRIS is flexible, designed to deliver maximum data reliability to meet your specific needs and project. Learn more…
Our HRIS Framework
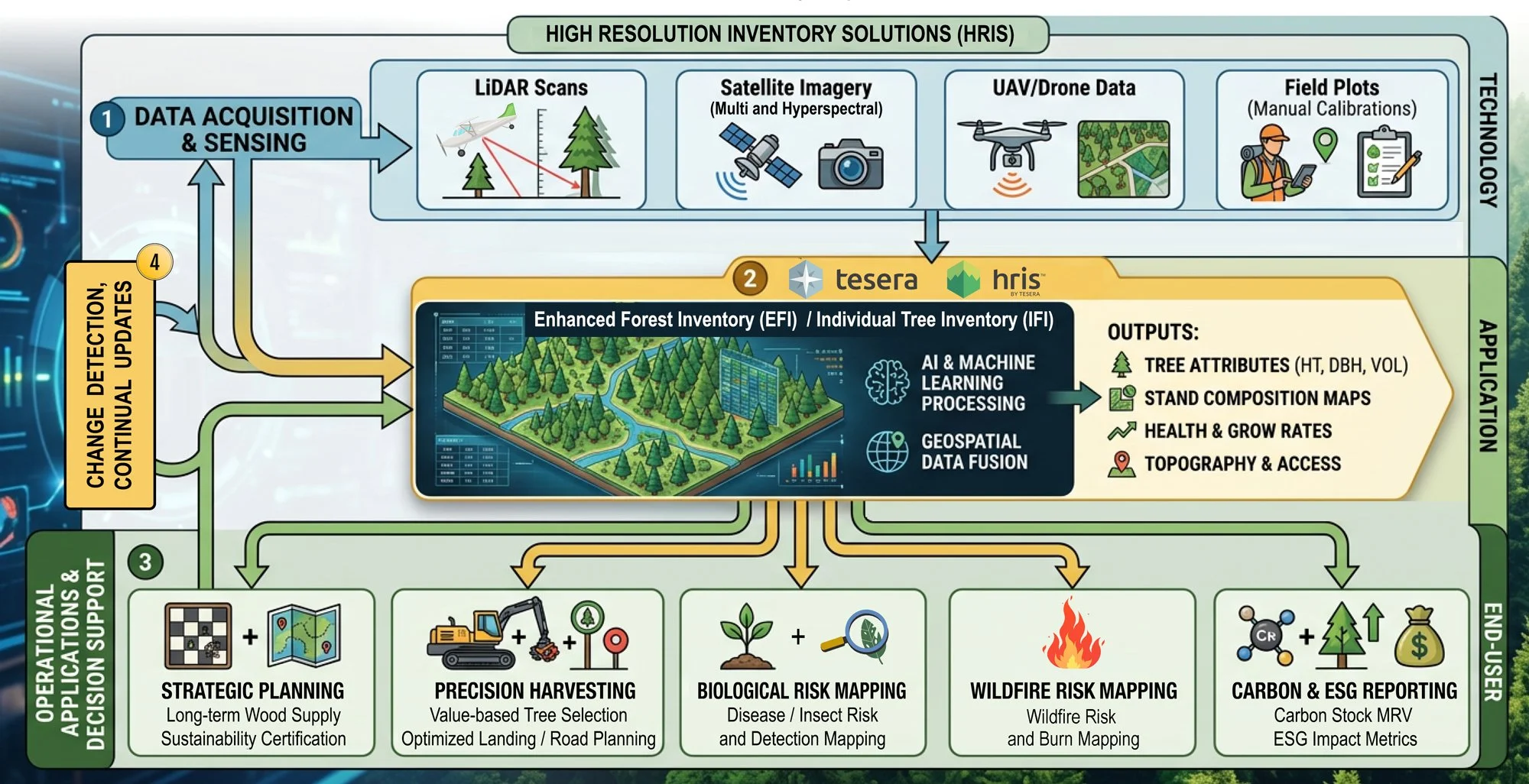
All HRIS inventories and data products can be visualized and analyzed using any standard GIS-based solution. The following outlines the inputs, processes and outputs for developing an HRIS Inventory.

Remote Sensing Data
HRIS is designed to use a range of remote sensing data, LiDAR, hyperspectral / multispectral satellite imagery, ground plot data (along with terrain and other data). HRIS can also accommodate terrain and other ancillary data.
This landscape level measurement data is used in combination with ground plot data to improve the accuracy and reliability of estimates for attributes and features at the microstand scale (e.g. tree species, etc). Machine learning features are calculated at the ground plot area and gridcell area from this landscape level.
Ground Plots (Fixed Radius)
HRIS applies a combination of Systematic Random Sampling and Strata Based Sampling. The number of ground plots required for an HRIS project is a function of the:
Size of the project area
Forest inventory attributes (requested by the client)
Precision of the classes within each attribute, and
Accuracy of the attribute values
Individual tree measurements are compiled as target attributes (at the plot area level). Tesera relates the compiled ground plot attributes to the remotely sensed data (LiDAR and imagery) over the same area. We would be glad to provide specific metrics on how different variable vs. fixed radius ground plot sampling strategies affect the inventory results:
Variable Radius plots are not typically used in an HRIS inventory, since the area extent of the individual tree measurements cannot be spatially defined. The lack of spatial extent for the measured trees represents a significant limitation of Variable Radius ground plots. Also, many more Variable Radius ground plots are required (as compared to Fixed Radius ground plots) to achieve the same statistical performance.
Fixed Radius plots have a defined area and, when sub-meter georeferenced, provide us with the ability to fuse with LiDAR and remote sensed multiband imagery. This allows us to build accurate models, for significantly more attributes, and then accurately predict those attributes over each polygon across the landscape. Our approach reliably automates the delineation of forest stand polygons, including land cover classification (at an average size of 0.5 acres/polygon). HRIS provides our clients with more comprehensive and statistically verifiable attributes for each forest stand polygon.
Microstands and Gridcells
An HRIS Inventory is presented at a microstand level.
Microstands delineate stand boundaries (that have internal homogeneity for stand stature, structure and composition) into small polygons, and typically range between 0.5 and 12 acres (0.2 and 5 hectares). Microstands reduce the boundary effects of stands associated with different land cover classes. HRIS microstands can be aggregated, using hard and soft constraints. Gridcell predicted target attributes are rolled-up to the microstand level.
The inventory analysis is done at the gridcell level.
A gridcell is a sub-segment of a microstand, having a similar size to the ground plot area (to ensure a common aerial unit of analysis). Gridcells are the aerial unit of analysis in the HRIS inventory, and are designed to align with the ground plot data spatial footprint. Gridcells begin as approximately 65 feet x 65 feet (20m x 20m; or 400 square meters) spatial sampling grids across the project area. The gridcell boundaries are then split to conform to microstand boundaries. Targeted attributes are predicted at the gridcell level.

Microstands (blue) and Gridcells (grey)
Machine Learning-based AI
HRIS utilizes Machine Learning-based AI to model the relationships between attributes and the features derived from LiDAR and Colour Infrared Imagery (at the ground plot level), and then to predict those attributes at the gridcell level. HRIS data transformations (including normalization and scaling) are also applied to make the dataset ready for our machine learning models.
Our analytics and machine learning techniques include k-nearest neighbour, linear regression, random forest, support vector machine, neural networks and XG boost.
The image (right) depicts the application of our machine learning models to present clusters of various types of vegetation, based on their captured spatial and LiDAR features. Learn about how we use ML-based AI…
Clusters of various types of vegetation
Stand & Stock Tables and Tree Lists
Stand and Stock Tables and Tree Lists are both ways of summarizing forest inventory data, but they differ in their level of detail and the types of information they provide.
Stand and Stock Tables summarize key inventory attributes such as basal area per hectare (BPH), trees per hectare (TPH), and merchantable volume per hectare (MVPH) by diameter class at the microstand level. They provide an overview of the forest's structure and composition, focusing on the distribution of trees by size class and their associated attributes.
Tree Lists, on the other hand, provide more detailed information about individual trees within a stand. They typically include measurements such as diameter at breast height (DBH), height, crown area, and potentially other tree-specific attributes. Tree lists can be generated by expanding the aggregated information from stand and stock tables to the tree level.
In summary, Stand and Stock Tables offer a summarized view of the forest stand, while Tree Lists provide detailed information on individual trees within the stand.
Technology Stack
Data Storage / Processing
Our raw data and large raster and point cloud data storage utilizes Amazon Web Services (AWS) with Simple Storage Service (S3).
Our data processing development utilizes Python and R, with Git and Github as our code repository. We compile all of our code to Docker images, so that they can be universally used in any of our process environments.
Data Processing
We have developed an advanced methodology that tiles our large datasets into small manageable pieces that can be easily processed as small tasks.
Data processing uses AWS Elastic Container Service, backed by EC2 Spot Instances. Our HRIS Runner, taking advantage of AWS Simple Queue Service, manages the individual tasks.
Data and Machine Learning
Data derived through our processing tasks is stored in AWS RDS (Relational Database Service) in PostgreSQL, or in AWS S3 (depending on its subsequent purpose).
Our Machine Learning models are running on AWS Sagemaker instances, so that we can prepare, build, train and deploy our models. We utilize analytical techniques with Pandas data profiling packages, AWS Sagemaker Data Wrangler. Our feature selection (or elimination) is based on statistical algorithms including chi-square test, pearson coefficient, recursive feature elimination etc.
ML and HRIS Outputs
The training of our models is based on the nature of the problem. We leverage machine learning algorithms like k-nearest neighbour, linear regression, random forest, support vector machine, neural networks/ deep neural networks and XG boost.
The resulting HRIS Inventory is stored in geospatial format in PostgreSQL, where it can be accessed by the HRIS Map Viewer, or can be queried through an API, or exported to other geospatial formats (or applications) for the client.